

In unserem Blogbeitrag vom 12. März 2020 haben wir erstmals die fahrzeugbasierte Gaslecksuche per Gasspürfahrzeug thematisiert und auf die Besonderheiten bei dieser Art der oberirdischen Überprüfung von erdverlegten Gasleitungen hingewiesen.
Damals waren die DVGW-Regelwerke G 465-1 (A) und G 465-4 (M) in neuer Fassung kurz zuvor veröffentlicht worden und die fahrzeuggestützte Überprüfung darin zum ersten Mal aufgegriffen und somit zum Stand der Technik erklärt worden. Durch die geplante EU-Methanverordnung und die damit verbundene Reduzierung von Methanemissionen gewinnt jede Form der Überprüfung von erdgasführenden Leitungen und die ggf. erforderliche zeitnahe Reparatur (LDAR = leak detection and repair) an Bedeutung.
In der Zwischenzeit ist das Forschungsvorhaben des DVGW zur Bewertung neuartiger Messmethoden zur Leitungsüberprüfung in Gasnetzen (EvaNeMeL), welches im ersten Blogbeitrag bereits angedeutet wurde, abgeschlossen, sodass wir dieses Thema wieder mehr in den Fokus rücken möchten.
Neue Erkenntnisse des Forschungsvorhabens EvaNeMeL
Im Rahmen des Vorhabens wurden neben anderer Gerätetechnik insgesamt fünf fahrzeugbasierte Systeme untersucht und bewertet, unter anderem auch unser GasCar Laser HUNTER.
Alle Systeme arbeiten nach dem TDLAS-Prinzip (Tunable Diode Laser Absorption Spectroscopy, zu Deutsch etwa: Absorptionsspektroskopie mittels durchstimmbarer Laserdioden) zur Detektion von Methan. Dieses Laserverfahren hat den Vorteil, dass es bei der spezifischen Messwellenlänge von Methan (λ = 1,65 μm) sehr empfindlich ist und keine relevanten Querempfindlichkeiten zu anderen Gasen in der Atmosphäre aufweist, z. B. Abgase von anderen Autos.
Die fünf Systeme wurden nochmal in zwei Kategorien aufgeteilt. Drei der fünf Systeme, unter anderem unser GasCar Laser HUNTER, sind bereits durch das aktuelle G 465 Regelwerk des DVGW abgedeckt. Sie arbeiten mit über die gesamte Fahrzeugfront angebrachten Sonden zur Ansaugung des Gasstroms. Dieser wird von einer Einheit, die meist im Heck des Fahrzeugs untergebracht ist, ausgewertet und das Ergebnis an ein Notebook mit spezifischer Software übermittelt.
Aufbau GasCar Laser HUNTER
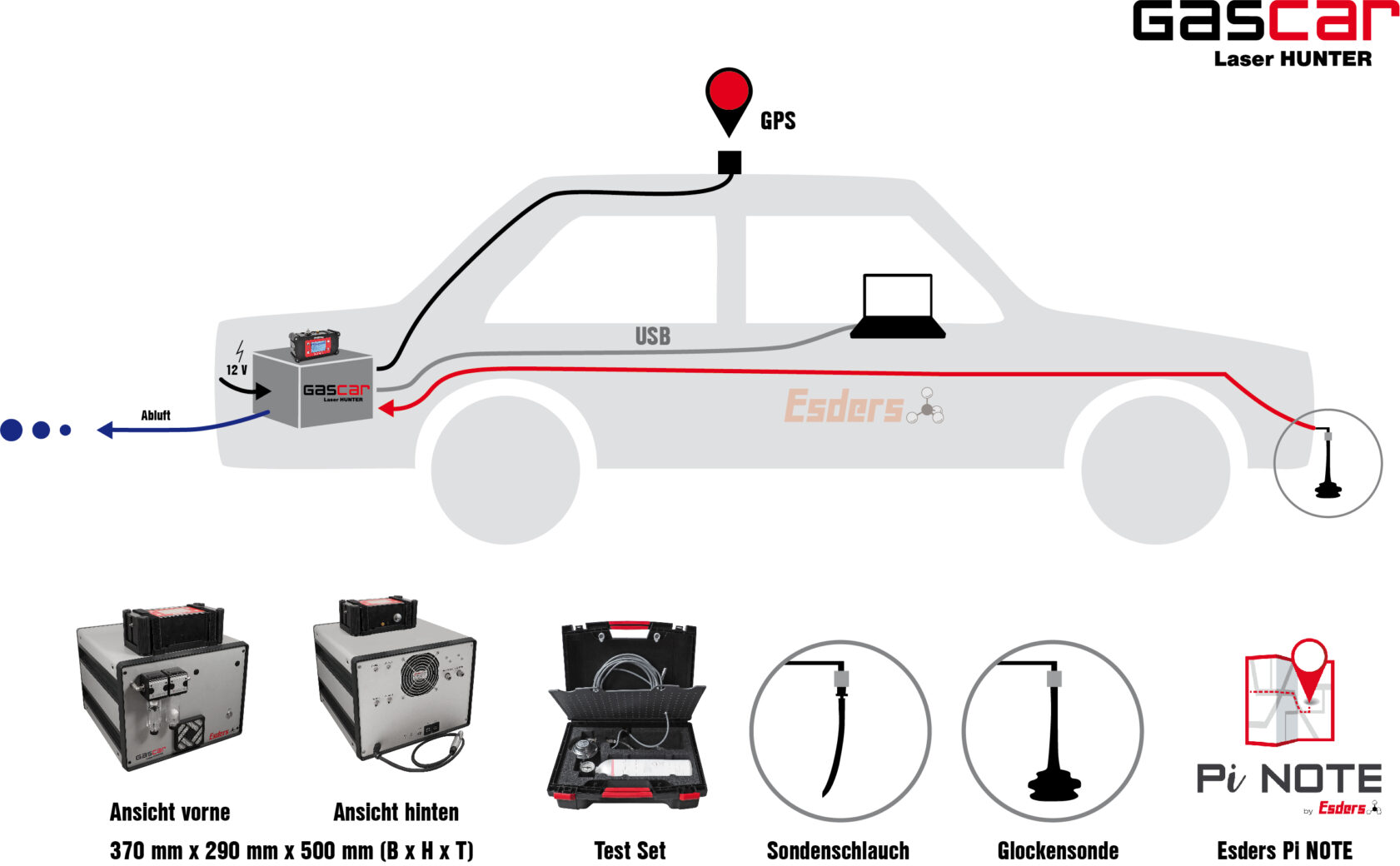
Die anderen beiden Systeme stellen eine neue Herangehensweise dar und erfassen zusätzlich zum Gasstrom noch die Windgeschwindigkeit und -richtung. Aus der Kombination der Messwerte wird in der Software im Anschluss die wahrscheinliche Position einer Leckage berechnet. Diese Systeme sind bisher nicht vom geltenden DVGW-Regelwerk abgedeckt.
Alle Systeme wurden in verschiedenen Messkampagnen mit einem konventionellen Gasspürer, der die Überprüfung mit einem handgeführten Messgerät und Teppichsonde durchgeführt hat, als Referenz verglichen.
Zudem wurden Laboruntersuchungen zur Empfindlichkeit, Querempfindlichkeit und Handhabung durchgeführt. Die Ergebnisse werden Anfang des nächsten Jahres in einem Fachbeitrag in der ewp veröffentlicht.
Ohne dem Fachbeitrag vorweg zu greifen, lässt sich festhalten, dass die bereits im ersten Blogbeitrag genannten Bedenken prinzipiell bestätigt wurden. Konkret bedeutet es, dass es folgende Grenzen beim Einsatz der fahrzeuggestützten Rohrnetzüberprüfung gibt.
- Aufgrund der höheren Geschwindigkeit ist die Zeit zum Ansaugen der Gasprobe viel kürzer. Dadurch können Leckstellen im ungünstigsten Fall ohne Detektion „überfahren“ werden.
- Insbesondere bei versiegelten Flächen tritt das Gas häufig nur an einer Stelle aus (z. B. am Rinnstein). Dadurch bildet sich oftmals keine homogene Gaswolke über der Austrittsstelle, was die Detektion erheblich erschwert.
- Parkende Fahrzeuge am Straßenrand behindern die ordnungsgemäße Überprüfung. Nicht überprüfbare Leitungsteile müssen daher später durch erneutes Befahren oder auf konventionelle Art geprüft werden.

Fazit
Als Fazit lässt sich festhalten, dass die fahrzeugbasierte Überprüfung für die LDAR (leak detection and repair) erdverlegter Gasleitungen eine sinnvolle Ergänzung zur konventionellen Überprüfung darstellen kann, wenn bestimmte Rahmenbedingungen gegeben sind.
Dazu zählen beispielsweise eine vernünftig befahrbare Strecke außerhalb von Ortschaften, um das Problem der parkenden Fahrzeuge zu vermeiden und kein zu starker Wind während der Überprüfung.
Ein Vorteil der fahrzeugbasierten Methode ist jedoch, dass sie auch nachts durchgeführt werden kann, was bei der konventionellen Überprüfung bisher nicht möglich ist bzw. nicht gemacht wird.
Erfreulich ist auch, dass das Forschungsvorhaben eine zumindest vage Antwort auf die häufig gestellte Frage nach der empfohlenen Überprüfungsgeschwindigkeit liefert. Je nach Verkehrssituation wurde eine Geschwindigkeit von 15 km/h bis 30 km/h als geeignet festgestellt.
Die Ergebnisse des Forschungsvorhabens, insbesondere mit Blick auf detaillierte Angaben zu den Einsatzbedingungen (z. B. Überprüfungsgeschwindigkeit) und Anforderungen an die Messtechnik, sollen als Grundlage zur Überarbeitung der bestehenden Regelwerke G 465-1 (A) und G 465-4 (M) dienen.
Mit einer neuen Fassung dieser beiden Regelwerke ist jedoch vermutlich erst im späteren Verlauf des nächsten Jahres, ggf. sogar erst in 2024 zu rechnen.